 |
||||||||||||||||||||||||
WstępJeden z pierwszych wirujących silników elektrycznych został wynaleziony w roku 1821 przez Michaela Faradaya. Ta maszyna elektryczna zrobiła małą rewolucje w życiu ludzi, tylko wiele lat później. Teraz żyjemy w 21 wieku i świat kordynalnie sięzmienił, lecz przez wiele ostatnich lat liderem w zastosowaniach technicznych jest silnik asynchroniczny, który jest w jednej z Silnik elektryczny asynchroniczny zaliczamy do maszyn elektrycznych indukcyjnych, które są jednocześnie maszynami prądu zmiennego. Następuje w nich przetwarzanie energii elektrycznej w energię mechaniczną (praca silnikowa maszyny) lub energii mechanicznej w elektryczną (praca generatorowa maszyny). Ich klasyfikacja wygląda następnie:
Budowa
Silnik indukcyjny składa się z dwóch zasadniczych części:
Zasada działaniaWytworzone przez uzwojenia stojana wirujące pole magnetyczne obraca się wokół nieruchomego wirnika. W wyniku przecinania przez to pole prętów klatki wirnika, indukuje się w nich napięcie (stąd nazwa ”silnik indukcyjny”) i zaczyna płynąć w nich prąd.(patrz zjawisko indukcji elektromagnetycznej). Przepływ prądu w polu magnetycznym powoduje powstanie siły elektrodynamicznej (patrz zjawisko powstawania siły elektrodynamicznej) działającej stycznie do obwodu wirnika, a zatem powstaje także moment elektromagnetyczny. Jeżeli wartość tego momentu jest większa od wartości momentu obciążenia, to wirnik rusza i zaczyna zwiększać swoja prędkość obrotową. Zwiększanie prędkości wirnika, powoduje, że pręty jego klatki przecinane są przez pole magnetyczne z coraz mniejszą prędkością, co skutkuje zmniejszeniem wartości indukowanej siły elektromotorycznej i spadkiem wartość prądu płynącego w prętach klatki, a zatem spada również wartość momentu elektromagnetycznego. Jeżeli moment ten spadnie do wartości równej momentowi obciążenia, wirnik przestanie przyspieszać i dalej będzie poruszał się ze stałą prędkością. Gdyby nie było żadnego momentu oporowego, wirnik osiągnąłby prędkość równą wartości prędkości wirowania pola, a więc prędkości synchronicznej. W takim przypadku pole wirnika byłoby nieruchome względem pola stojana, a więc ustałoby przecinanie prętów klatki przez pole stojana i nie płynęłyby w nich prądy, nie powstałby moment elektromagnetyczny. Sytuacja taka nie jest jednak możliwa do wystąpienia w rzeczywistym silniku, ponieważ zawsze występuje jakiś moment obciążenia, chociażby moment tarcia w łożyskach czy oporów powietrza (chyba, że wirnik będzie napędzany mechanicznie przez jakiś inny silnik). Zatem wirnik osiągnie taką prędkość (zwykle niewiele mniejsza od prędkości synchronicznej), przy której momenty elektromagnetyczny silnika i obciążenia będą miały tą samą wartość. Skoro nie jest to prędkość synchroniczna, musi to być prędkość asynchroniczna, której silnik indukcyjny zawdzięcza swoja druga nazwę - “silnika asynchronicznego”. Zobacz również: |
||||||||||||||||||||||||
| Prosty kalkulator na javascript | ||||||||||||||||||||||||
|
||||||||||||||||||||||||
 |
||||||||||||||||||||||||
 ostatnich generacji silników elektrycznych. Ma on najszerszych zastosowaniach ze wszystkich rodzaji silników elektrycznych, wykorzystywany szczególnie w przemyśle, ale również i w sprzęcie domowym. Ze wszystkich silników wyróżnia się tym, że ma prostą budowę, łatwy w obsłudze, ma małe koszty przy wykonaniu i eksploatacji, oprócz tego ich właściwości napędowe są dobre.
ostatnich generacji silników elektrycznych. Ma on najszerszych zastosowaniach ze wszystkich rodzaji silników elektrycznych, wykorzystywany szczególnie w przemyśle, ale również i w sprzęcie domowym. Ze wszystkich silników wyróżnia się tym, że ma prostą budowę, łatwy w obsłudze, ma małe koszty przy wykonaniu i eksploatacji, oprócz tego ich właściwości napędowe są dobre.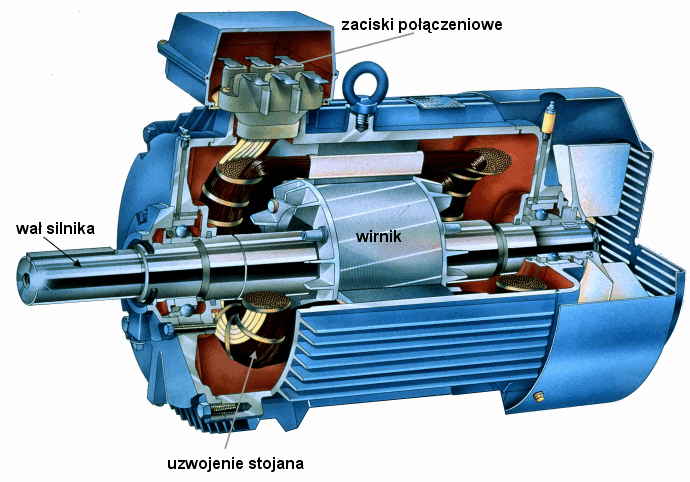
 Na wewnętrznej stronie rdzenia stojana i zewnętrznej stronie rdzenia wirnika wykonuje się specjalne rowki, zwane żłobkami, w których umieszczane są uzwojenia. Część rdzenia pomiędzy sąsiednimi rowkami, nazywana jest zębem. Żłobki i zęby mogą posiadać różne kształty, zwykle ich liczba w stojanie i wirniku jest różna. Pomiędzy stojanem a wirnikiem znajduje się możliwie mała szczelina powietrzna.
Na wewnętrznej stronie rdzenia stojana i zewnętrznej stronie rdzenia wirnika wykonuje się specjalne rowki, zwane żłobkami, w których umieszczane są uzwojenia. Część rdzenia pomiędzy sąsiednimi rowkami, nazywana jest zębem. Żłobki i zęby mogą posiadać różne kształty, zwykle ich liczba w stojanie i wirniku jest różna. Pomiędzy stojanem a wirnikiem znajduje się możliwie mała szczelina powietrzna.